

Introduction
Image
segmentation is the partitioning of images into various regions, in which
every region has a different entity. An efficient tool for image segmentation
is a convolutional
neural network (CNN). Recently, there has been a significant impact of CNNs
that are designed to perform image segmentation. One the best models presented was
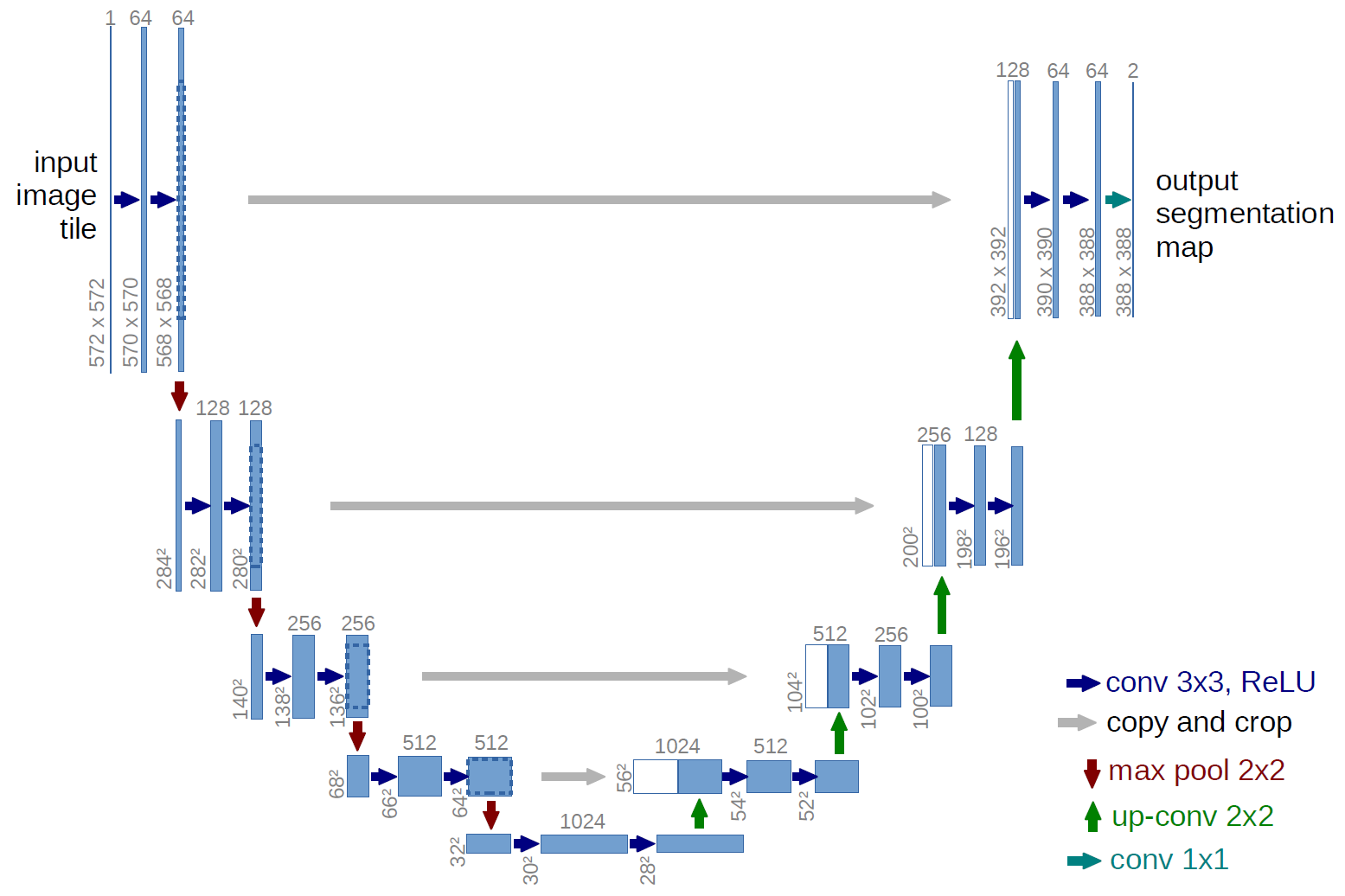
the U-Net. A U-Net is U-shaped
convolutional neural network that was originally designed to segment biomedical
images. Such a network is better
than conventional models, in terms of architecture and pixel-based image
segmentation formed from convolutional neural network layers. Similar to all
CNNs, this network consists of convolution, Max-pooling, and ReLU activation
layers. However, in a general view, U-Net
can be seen as an encoder-decoder network. The encoder is the first part of
this network and it is a conventional convolutional neural network like VGG or ResNet that is composed of
convolution, pooling, and downsampling layers used to learn some feature maps
of the input images. The decoder part is the upsampling and concatenation part
which is meant to semantically project the learned discriminative features
(lower resolution) by the encoder part onto the pixel space (higher resolution)
to get a dense classification.
U-Net has shown great efficiency and accuracy when applied
to various segmentation tasks in medicine and other fields. Moreover, such a
network has also shown good performance when training datasets is quite small.
Thus, in this article, we will implement a U-Net using Keras Library. The network will be built and
trained using a medical dataset named nuclei. After
training, the network must be capable of segmenting a nucleus in a cell image.
U-Net Implementation for Nuclei Segmentation
In this work, we will implement a U-Net for segmenting or
detecting the nuclei in images. The U-Net implementation will undergo 4 stages:
- Loading Dataset
- Building encoder and decoder
- Training the U-Net
- Testing the U-Net
Loading Dataset
A human’s body consists of 40 trillion cells that have a nucleus
that is full of DNA. Hence, the detection or identifying nuclei of a cell can be
the starting point of most tests and analyses. Moreover, researchers need also
to identify the nuclei of cells in order to investigate the reaction of cells to
treatments and understand the underlying biological processes at work. Thus, it
is important to have an automated and intelligent system for the segmentation
of nuclei. Such a system can be best using U-Net.
The dataset that will be used to train and test the build
U-Net is the nuclei, found on Kaggle. The dataset consists of many stages
however in this work, we will use the train stage 1 and test stage 1, for
training and testing, respectively. Once, you download the dataset you find out
that training images consist of a file called images, which have images of
cells in addition to their associated ImageIDs. The training images file has
also a separate file for every image’s mask. Hence, our code here should read
original images in addition to their masks by their ImageIDs.
Before loading the dataset, let’s first load some libraries
and packages we will need when building the network.
import tensorflow as tf
import os
import sys
import numpy as np
from tqdm import tqdm
from itertools import chain
from skimage.io import imread, imshow
from skimage.transform import resize
from tensorflow.compat.v1 import ConfigProto
from tensorflow.compat.v1 import InteractiveSession
config = ConfigProto()
config.gpu_options.allow_growth = True
session = InteractiveSession(config=config)
with that set, let’s load our train images and their corresponding
masks.
# tf.enable_eager_execution()
IMG_WIDTH = 128
IMG_HEIGHT = 128
IMG_CHANNELS = 3
DATA_PATH = r'C:/Users/abdul/Downloads/stage1_train/'
seed = 42
np.random.seed = seed
image_ids = next(os.walk(DATA_PATH))[1]
X = np.zeros((len(image_ids), IMG_HEIGHT, IMG_WIDTH, IMG_CHANNELS),
dtype=np.uint8)
Y = np.zeros((len(image_ids), IMG_HEIGHT, IMG_WIDTH, 1),
dtype=np.bool)
for n, id_ in tqdm(enumerate(image_ids), total=len(image_ids)):
path = DATA_PATH + id_
img = imread(path +
'/images/' + id_ + '.png')[:,:,:IMG_CHANNELS]
img = resize(img,
(IMG_HEIGHT, IMG_WIDTH), mode='constant', preserve_range=True)
X[n] = img
mask =
np.zeros((IMG_HEIGHT, IMG_WIDTH, 1), dtype=np.bool)
for mask_file in
next(os.walk(path + '/masks/'))[2]:
mask_ = imread(path +
'/masks/' + mask_file)
mask_ =
np.expand_dims(resize(mask_, (IMG_HEIGHT, IMG_WIDTH), mode='constant',
preserve_range=True), axis=-1)
mask = np.maximum(mask,
mask_)
Y[n] = mask
x_train=X
y_train=Y
Building the U-Net
The first part of building the U-Net is building the first part
which as discussed above an encoder network that consists of convolution,
pooling, and downsampling. We will create a simple convolutional neural network
of 5 convolutional layers.
# Build U-Net model
inputs = tf.keras.layers.Input((IMG_HEIGHT, IMG_WIDTH, IMG_CHANNELS))
s = tf.keras.layers.Lambda(lambda x: x / 255)(inputs)
c1 = tf.keras.layers.Conv2D(16, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(s)
c1 = tf.keras.layers.Dropout(0.1)(c1)
c1 = tf.keras.layers.Conv2D(16, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c1)
p1 = tf.keras.layers.MaxPooling2D((2, 2))(c1)
c2 = tf.keras.layers.Conv2D(32, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(p1)
c2 = tf.keras.layers.Dropout(0.1)(c2)
c2 = tf.keras.layers.Conv2D(32, (3, 3), activation=tf.keras.activations.elu,
kernel_initializer='he_normal',
padding='same')(c2)
p2 = tf.keras.layers.MaxPooling2D((2, 2))(c2)
c3 = tf.keras.layers.Conv2D(64, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(p2)
c3 = tf.keras.layers.Dropout(0.2)(c3)
c3 = tf.keras.layers.Conv2D(64, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c3)
p3 = tf.keras.layers.MaxPooling2D((2, 2))(c3)
c4 = tf.keras.layers.Conv2D(128, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(p3)
c4 = tf.keras.layers.Dropout(0.2)(c4)
c4 = tf.keras.layers.Conv2D(128, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c4)
p4 = tf.keras.layers.MaxPooling2D(pool_size=(2, 2))(c4)
c5 = tf.keras.layers.Conv2D(256, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(p4)
c5 = tf.keras.layers.Dropout(0.3)(c5)
c5 = tf.keras.layers.Conv2D(256, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c5)
Now, we should hook up this part to the second part of the U-net
which is the upsampling or decoder part.
u6 = tf.keras.layers.Conv2DTranspose(128, (2, 2), strides=(2, 2),
padding='same')(c5)
u6 = tf.keras.layers.concatenate([u6, c4])
c6 = tf.keras.layers.Conv2D(128, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(u6)
c6 = tf.keras.layers.Dropout(0.2)(c6)
c6 = tf.keras.layers.Conv2D(128, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c6)
u7 = tf.keras.layers.Conv2DTranspose(64, (2, 2), strides=(2, 2),
padding='same')(c6)
u7 = tf.keras.layers.concatenate([u7, c3])
c7 = tf.keras.layers.Conv2D(64, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(u7)
c7 = tf.keras.layers.Dropout(0.2)(c7)
c7 = tf.keras.layers.Conv2D(64, (3, 3), activation=tf.keras.activations.elu,
kernel_initializer='he_normal',
padding='same')(c7)
u8 = tf.keras.layers.Conv2DTranspose(32, (2, 2), strides=(2, 2),
padding='same')(c7)
u8 = tf.keras.layers.concatenate([u8, c2])
c8 = tf.keras.layers.Conv2D(32, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(u8)
c8 = tf.keras.layers.Dropout(0.1)(c8)
c8 = tf.keras.layers.Conv2D(32, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c8)
u9 = tf.keras.layers.Conv2DTranspose(16, (2, 2), strides=(2, 2),
padding='same')(c8)
u9 = tf.keras.layers.concatenate([u9, c1], axis=3)
c9 = tf.keras.layers.Conv2D(16, (3, 3), activation=tf.keras.activations.elu,
kernel_initializer='he_normal',
padding='same')(u9)
c9 = tf.keras.layers.Dropout(0.1)(c9)
c9 = tf.keras.layers.Conv2D(16, (3, 3),
activation=tf.keras.activations.elu, kernel_initializer='he_normal',
padding='same')(c9)
outputs = tf.keras.layers.Conv2D(1, (1, 1), activation='sigmoid')(c9)
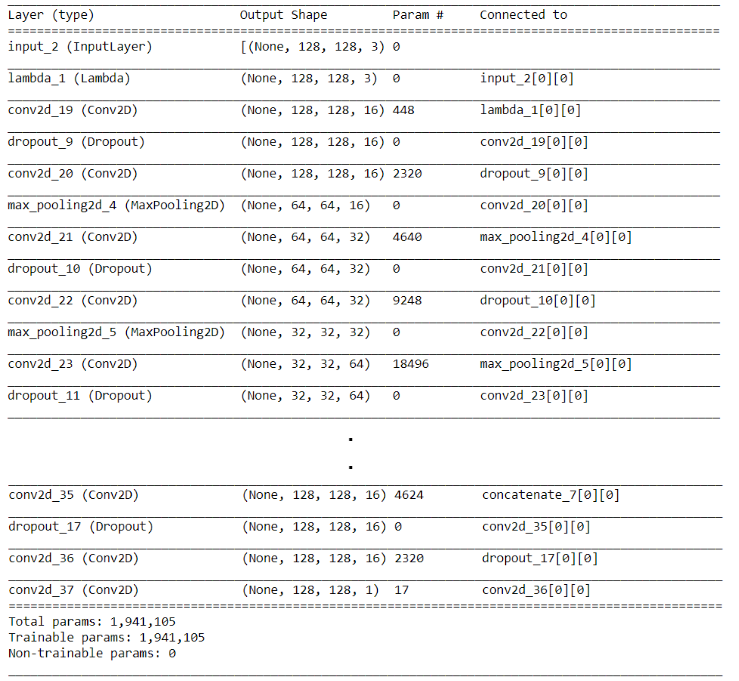
After the network is built, we will define the model and set its
optimizer preparing it for the training stage. We will use ADAM as an optimizer and
binary cross entropy as a loss function. This will finally get you the final
architecture of the designed model.
model = tf.keras.Model(inputs=[inputs], outputs=[outputs])
model.compile(optimizer='adam', loss='binary_crossentropy',
metrics=['accuracy'])
model.summary()
Training the U-Net
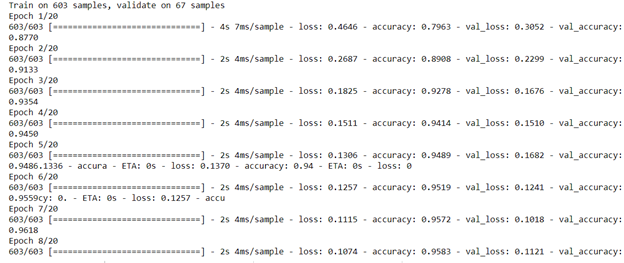
In here, we will feed the loaded images in the first part, to the
designed U-Net and train it using all training images keeping 10% for
validation. We will set the number of epochs to 20 which must be enough for the
network to converge. If not, you can increase the number of epochs.
Network Testing and Evaluation
It was seen that network reached a very high accuracy rate at epoch
20, however, the network hasn’t been tested yet on images that were not part of the
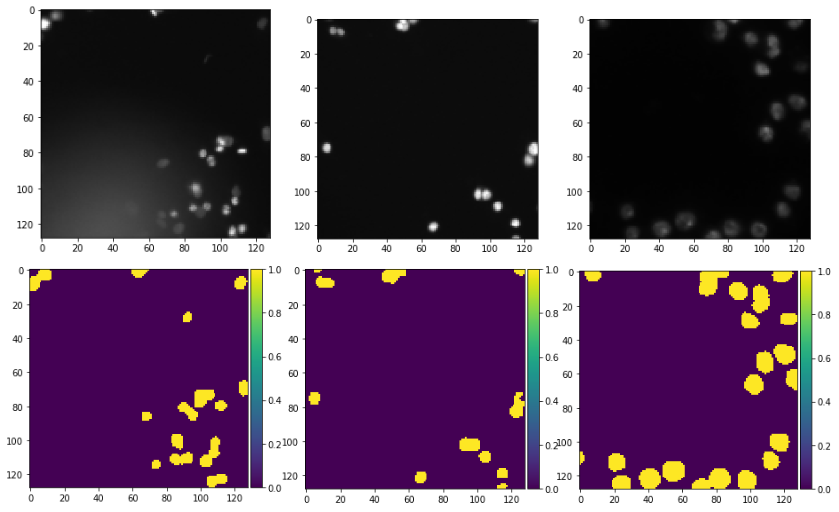
training set. In this section, we will let the U-Net predict the segmentation
output of some testing images and visualize the results.
import matplotlib.pyplot as plt
idx = np.random.randint(0, len(x_test))
x=np.array(x_test[idx])
x=np.expand_dims(x, axis=0)
predict = model.predict(x, verbose=1)
predict = (predict > 0.5).astype(np.uint8)
imshow(np.squeeze(predict[0]))
plt.show()
imshow(x_test[idx])
plt.show()
this will get us images and their segmented outputs as follows:
Conclusion
In this article, we implemented a simple U-Net using Keras. The
designed U-Net encoder part is a simple deep network, however other pre-trained models can be used such as ResNet and VGGs. Such models can improve
the performance of a U-Net as it owns more powerful feature extraction
capabilities.
Comments
Post a Comment